背景与目标
随着飞机设计复杂性的增加,传统单学科仿真已无法满足多学科耦合分析的需求。本方案旨在构建一个支持气动(Aerodynamics)、结构(Structure)、控制(Control)多学科协同仿真的平台,实现跨学科数据交互、动态耦合分析与优化设计,缩短研发周期,提高设计精度。
一、平台核心模块设计
1.多学科仿真工具集成
-气动模块:集成CFD软件(如ANSYSFluent、OpenFOAM),用于气动载荷计算、流场分析。
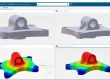
-结构模块:集成FEA工具(如Abaqus、NASTRAN),用于结构强度、振动及变形分析。
-控制模块:集成控制仿真工具(如MATLAB/Simulink、Modelica),用于飞行控制律设计与动态响应分析。
2.协同耦合接口开发
-标准化数据接口:通过FMI(FunctionalMock-upInterface)或自定义API实现跨工具数据交互。
-实时数据交换:采用TCP/IP或共享内存技术,支持动态耦合仿真中的高频数据传递。
二、多学科耦合分析框架
1.气动-结构耦合(FSI)
-双向耦合:气动载荷驱动结构变形,变形后的几何反馈至气动模块更新流场。
-应用场景:机翼颤振分析、气动弹性优化。
2.结构-控制耦合
-模态传递:将结构模态参数(如固有频率、阻尼比)传递给控制模块,优化控制策略。
-应用场景:主动振动抑制、飞行器姿态鲁棒控制。
3.气动-控制耦合
-动态响应仿真:气动特性实时影响控制输入(如舵面偏转),控制输出反馈至气动模型。
-应用场景:飞行包线边界验证、紧急状态控制律测试。
三、平台架构设计
1.分层架构
-用户层:提供统一操作界面(Web或桌面端),支持参数配置、任务提交与结果可视化。
-协同层:负责任务调度、数据管理与耦合逻辑,集成优化算法(如遗传算法、梯度下降)。
-工具层:封装各学科仿真工具,通过适配器实现工具间解耦。
2.关键技术
-高精度时间同步:采用固定步长或动态时间步策略,解决多学科仿真时间尺度差异。
-分布式计算:基于HPC或云计算实现大规模并行仿真(如MPI、Kubernetes)。
四、数据管理与优化
1.数据标准化与存储
-定义统一数据格式(如XML、HDF5),存储仿真输入/输出及中间结果。
-建立数据库(如MySQL、MongoDB)支持版本控制与历史数据回溯。
2.多目标优化
-集成多学科优化(MDO)框架,平衡气动效率、结构轻量化与控制稳定性。
-示例优化目标:最小化机翼重量,同时满足升阻比和颤振边界要求。
五、实施路径与挑战
1.分阶段开发
-阶段1:搭建基础框架,实现气动-结构单向耦合。
-阶段2:扩展至控制模块,完成动态耦合闭环。
-阶段3:集成优化算法与云平台支持。
2.关键挑战
-工具兼容性:不同仿真软件的接口协议差异需通过适配器解决。
-计算效率:耦合仿真计算量大,需优化算法并行度与资源调度。
-验证与校准:通过风洞试验或飞行测试数据校准模型精度。
六、典型应用场景
1.飞行器总体设计:快速评估不同布局方案的多学科性能。
2.极端工况验证:模拟大攻角失速、突风载荷下的结构-控制耦合响应。
3.数字孪生:结合实时传感器数据,构建飞行器健康管理(PHM)系统。
七、案例参考
-NASA的ADAMS/Carrier:多体动力学与气动耦合仿真平台。
-达索SIMULIA协同仿真:集成Abaqus、XFlow与Dymola的多学科解决方案。
通过该平台,可显著提升飞机设计的系统性与可靠性,为未来先进飞行器研发提供技术支撑。