使用 CATIA 多体库在Dymola中创建和分析多体模型是模拟机械装配体并了解其在不同条件下行为的好方法。
在本文中,我们将了解有关充分利用 CATIA 多体库集成的重要信息。
什么是 CATIA 多体库?
CATIA MultiBody/MultibodyCutJoints 库是将机械 CATIA 装配转换为功能性 Dymola 模型的重要工具。
这不是一个可以手动导入的库;但是,只要您使用“从运动学生成”功能或运行需要它的 Dymola 模型,就可以导入该库。

行为建模应用程序支持此功能;它支持所有标准 CATIA 关节(用户定义的约束除外)。模型的运动学表示必须通过 0 自由度命令的 CATIA 机构生成。
CATIA的机制管理器是什么?
CATIA 机构管理器显示每个机构的自由度,以帮助您确保每个组件均已固定,这将有助于防止整个装配体在空间中浮动。
在 Dymola 中,CATIA 装配中的每个零件和关节都得到了表示,包括具有固定旋转的全局主体组件。
要从 CATIA 机构创建 Dymola 模型,您必须定义一个零自由度的机构。这很重要,因为它确保模型在模拟中表现可预测。在 CATIA 中,您将使用机构管理器来验证这一点,寻找除了一个受控自由度之外完全受约束的机构。
分解 Dymola 运动学模型

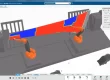
此图像代表 Dymola 运动模型的标准设置。此设置包括装配体每个零件的单独模型和连接的不同模型,用于模拟零件之间的机械连接。此外,还包括一个全局主体组件,该组件通过固定旋转锚定到“世界”组件。
这种固定旋转是所有型号的一致特征,不需要任何修改。在组件中,受控接头设计为与两个连接器连接以进行操作控制,但在任何给定时间仅使用一个连接器。这在踏板机构的模型视图中很明显,其中存在单个连接器。
模型中的关节
当涉及到控制关节时,您有三个选择:无、位置和力。位置控制允许通过特定源块进行精确驱动,而力控制则响应外部激励,由扭矩和力源组件管理。
如何在 Dymola 中生成多体模型

生成 Dymola 模型时,请使用行为建模应用程序的“从运动学生成”功能。您需要提供类名、选择父类并选择有效的机制。请记住,模型将出现在所选的父类中以及名为“Internal generated”的子包下。仅编辑顶级模型,而不编辑锁定的InternalGenelated 模型。
生成后,模型出现在选定的类和内部生成的子包中。模型InternalGenerate被锁定并编辑;任何更改都应该在顶层模型中进行。

常见问题故障排除
尽管这个过程很简单,但也可能会出现问题。以下是一些常见问题和解决方案:
自由度数不正确

当您的机构的命令自由度不为零时,就会出现此错误。该模型可能仍然有效,但它不会那么准确并导致大量的模拟时间。要解决此问题,请尝试继续执行以下操作:
可能的解决步骤:
- 切换到 CATIA 装配体以查看受影响的机制。
- 确保受控关节由机构管理器中的角度或位移控制
- 修复其中一个组件(如果尚未修复)并重新检查 DOF
- 查看整个装配体的 DOF 以查看是否有任何部分受到部分约束
- 在子装配体中重新创建机制以查看 DOF
缺少质量和惯性数据

有时 Dymola 不会自动填充海量数据。在这种情况下,您可能需要尝试以下操作:
可能的解决步骤:
- 测量CATIA装配中每个零件的惯性数据并尝试更新和重新生成Dymola模型
- 更改零件的材料密度并更新/重新生成 Dymola 模型
- 如果所有其他方法均失败,请从惯性测量中手动输入数据
切割接头或棱柱环错误
这些错误通常源于冲突的 CATIA 关节。简化模型或确保子装配体的灵活性可能会解决这些问题。
成功集成的最佳实践
- 在生成 Dymola 模型之前,请务必确认 CATIA 中的自由度。
- 不要直接编辑锁定的InternalGenerate模型;任何改变都应该对顶层模型进行。
- 通过返回 CATIA 并根据需要调整模型来排除错误。
- 对于丢失的数据,请考虑手动输入作为最后的手段。
通过 CATIA 在 Dymola 中创建和分析多体模型是一个强大的过程,可以简化机械系统的仿真和建模。通过正确理解和利用 CATIA MultiBody 库,您可以为机械装配体创建详细且准确的 Dymola 仿真。牢记这些技巧,您将简化模拟过程,获得对机械设计的宝贵见解。